Research
I'm interested in Multimodal foundation models, 3D computer vision, autonomous driving.
My research focuses on developing end-to-end learning systems for autonomous vehicles,
and let the driving model can think itself.
I'm particularly interested in vision-language-action (VLA) models with reasoning capabilities
and world models for embodied AI.
|
Selected Publications
For a complete list of publications, please visit my Google Scholar profile.
|
|
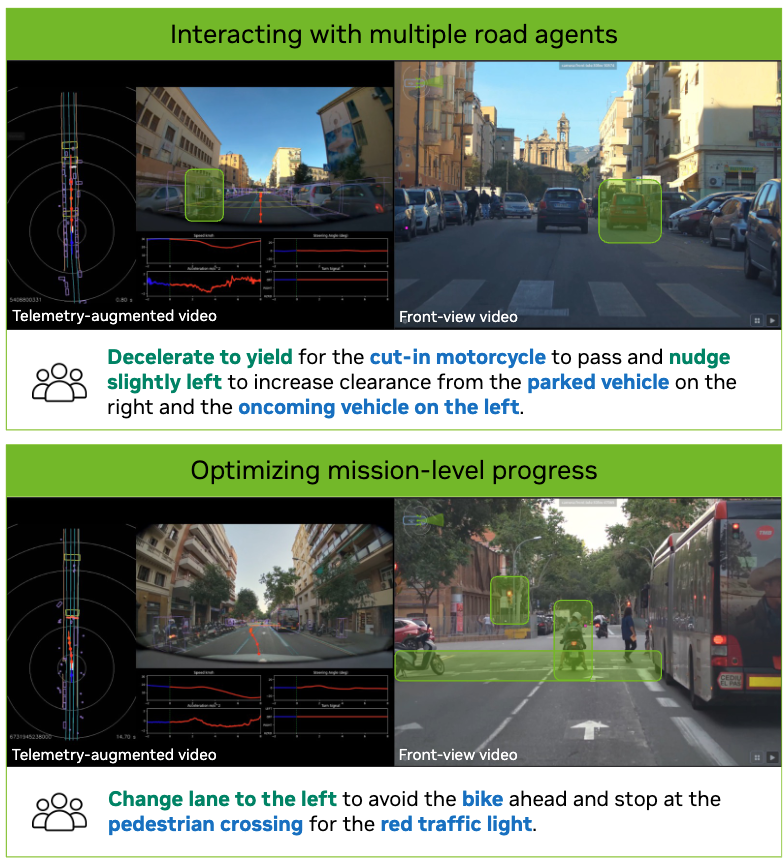
Alpamayo-R1: Bridging Reasoning and Action Prediction for Generalizable Autonomous Driving in the Long Tail
Project Lead
NVIDIA Technical Report, 2025
PDF
A vision-language-action model integrating Chain of Causation reasoning with trajectory planning, demonstrating improvements on open-loop, closed-loop evaluation, and real-world road tests. Announced as Alpamayo 1 by Jensen Huang at CES 2026.
|
|
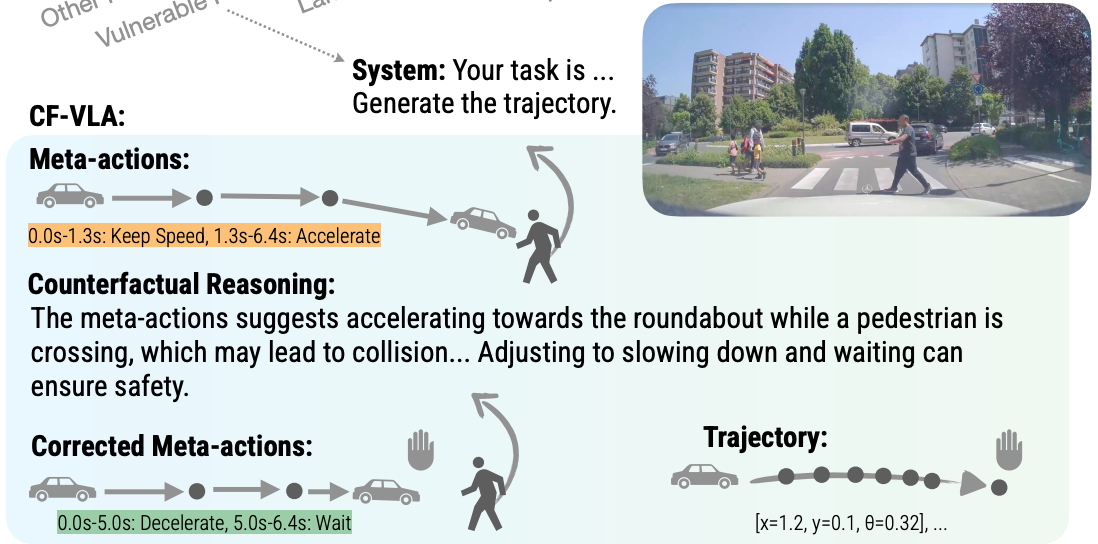
Counterfactual VLA: Self-Reflective Vision-Language-Action Model with Adaptive Reasoning
Zhenghao "Mark" Peng, Wenhao Ding, Yurong You, Yuxiao Chen, Wenjie Luo, Thomas Tian, Yulong Cao, Apoorva Sharma, Danfei Xu, Boris Ivanovic, Boyi Li, Bolei Zhou, Yan Wang*, Marco Pavone*
* Co-advised
arXiv, 2025
arXiv
A self-reflective VLA model with adaptive reasoning capabilities that learns from counterfactual feedback to improve decision-making in autonomous driving.
|
|
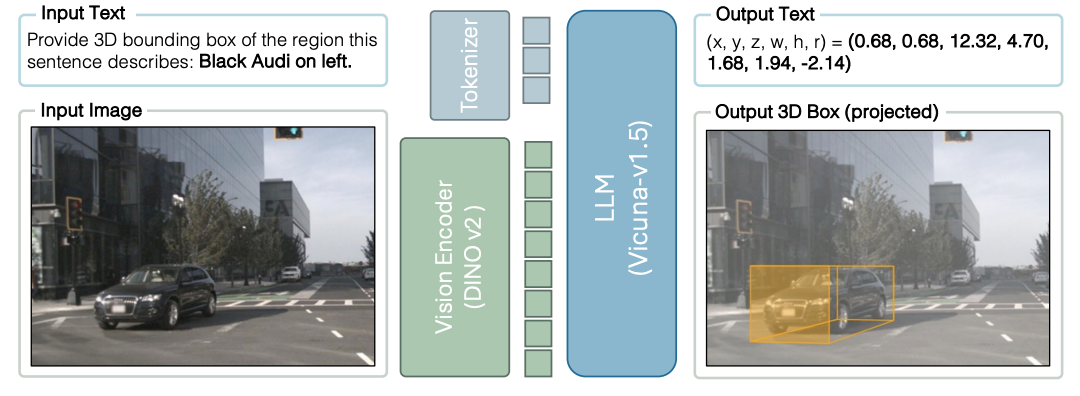
Language-Image Models with 3D Understanding
Jang Hyun Cho, Boris Ivanovic, Yulong Cao, Edward Schmerling, Yue Wang, Xinshuo Weng, Boyi Li, Yurong You, Philipp Krähenbühl*, Yan Wang*, Marco Pavone*
* Co-advised
ICLR, 2025
OpenReview
Bridging vision-language models (VLMs) with 3D understanding.
|
|
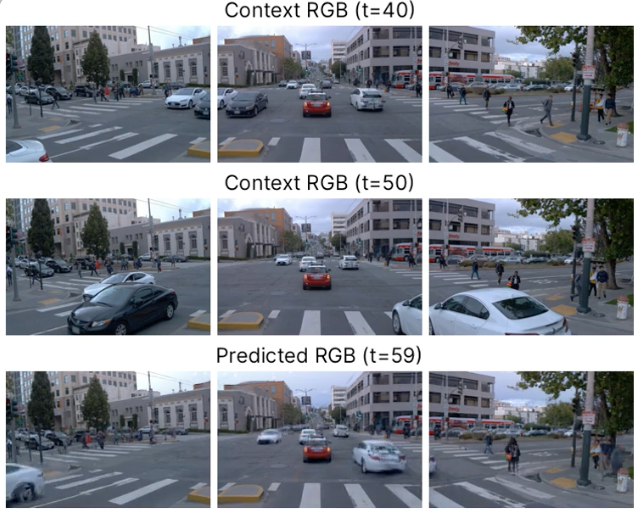
STORM: Spatio-Temporal Reconstruction Model for Large-Scale Outdoor Scenes
Jiawei Yang, Jiahui Huang, Yuxiao Chen, Yan Wang, Boyi Li, Yurong You, Maximilian Igl, Apoorva Sharma, Peter Karkus, Danfei Xu, Boris Ivanovic, Yue Wang, Marco Pavone
ICLR, 2025
OpenReview
A feed-forward, self-supervised method for fast and accurate reconstruction of dynamic 3D scenes from sparse, multi-timestep, posed camera images.
|
|
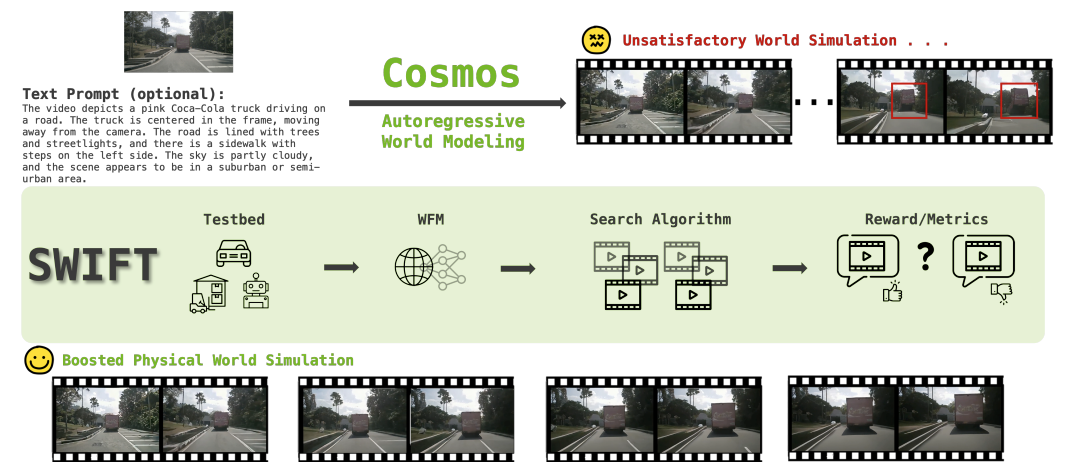
Can Test-Time Scaling Improve World Foundation Model?
Wenyan Cong, Hanqing Zhu, Peihao Wang, Bangya Liu, Dejia Xu, Kevin Wang, David Z. Pan, Yan Wang, Zhiwen Fan, Zhangyang Wang
COLM, 2025
arXiv
Exploring test-time scaling strategies for world foundation models.
|
|
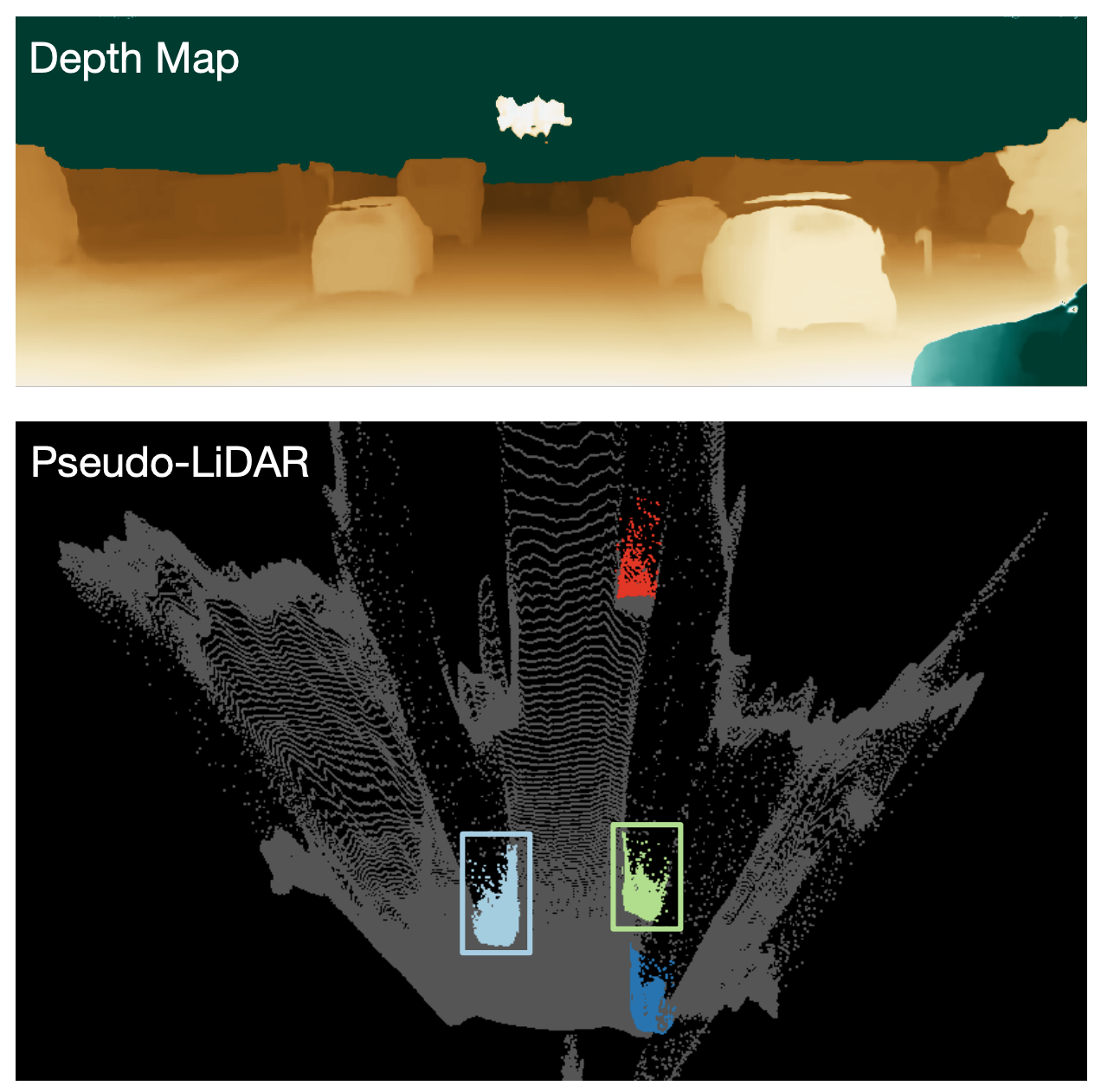
Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving
Yan Wang, Wei-Lun Chao, Div Garg, Bharath Hariharan, Mark Campbell, Kilian Q. Weinberger
CVPR, 2019
arXiv
Proposing the Pseudo-LiDAR representation that bridges the gap between image-based and LiDAR-based 3D object detection.
|
|
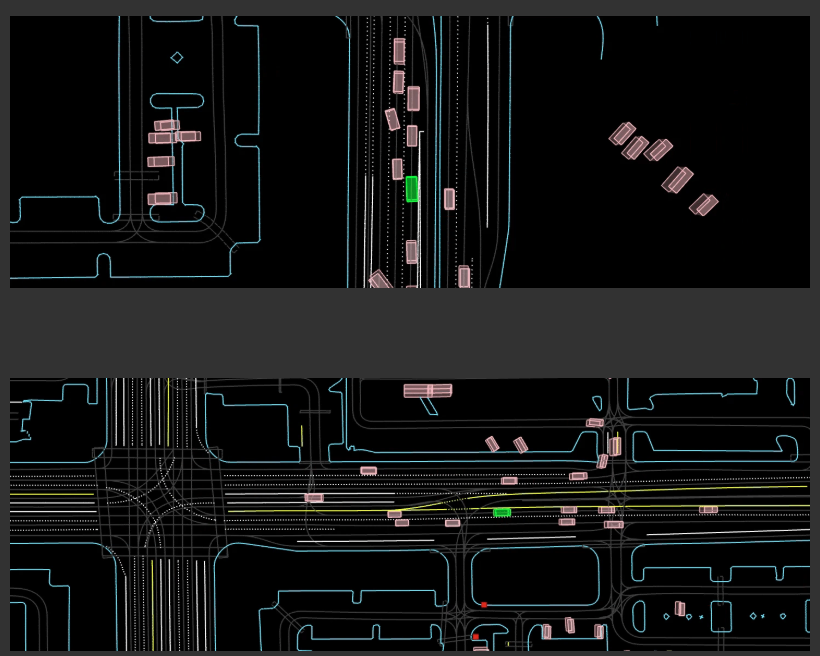
Waymax: An Accelerated, Data-Driven Simulator for Large-Scale Autonomous Driving Research
Cole Gulino, Justin Fu, Wenjie Luo, George Tucker, Eli Bronstein, Yiren Lu, Jean Harb, Xinlei Pan, Yan Wang, et al.
NeurIPS, 2023
arXiv
/
code
A high-performance, JAX-based simulator for autonomous driving research enabling large-scale RL training.
|
Academic Service
Workshop Organizer:
- CVPR 2026: End-to-End 3D Learning
- ICCV 2025: End-to-End 3D Learning
- ECCV 2024: Autonomous Vehicles meet Multimodal Foundation Models
- CVPR 2023: Autonomous Driving Workshop
- CVPR 2022: Autonomous Driving Workshop
- CVPR 2021: Autonomous Driving Workshop
Conference Reviewer: CVPR, ICCV, ECCV, NeurIPS, ICLR, ICML, ICRA, AAAI, IJCAI, AISTATS
Journal Reviewer: IEEE TPAMI, TKDE
|
|

